|
|
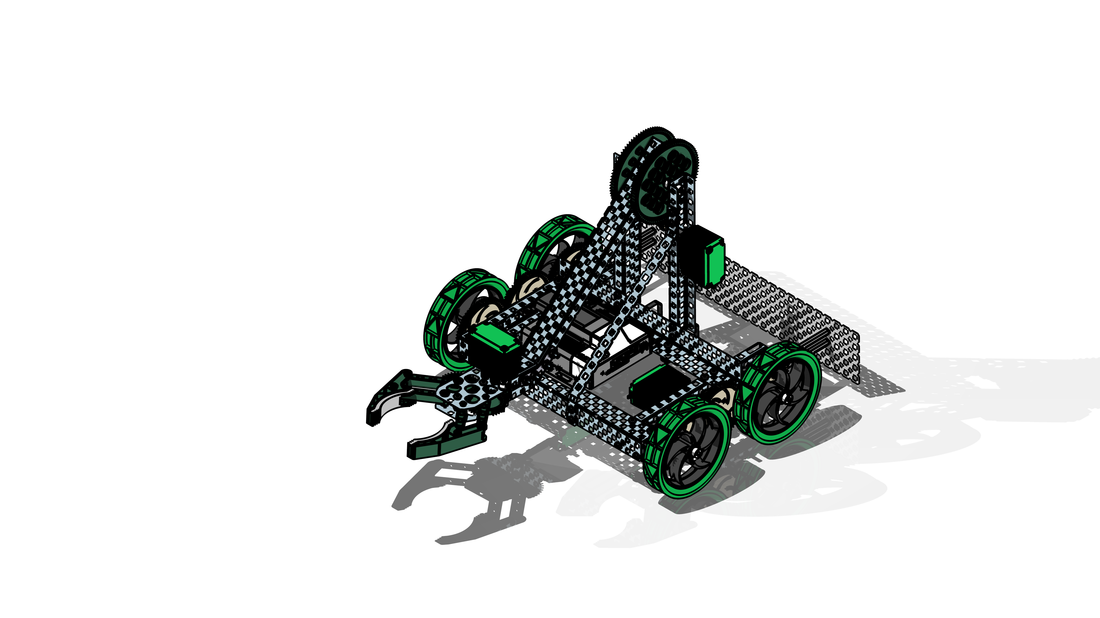
① ---- ② |
Renderings of Our 1st and 2nd Clawbot
ClawBot Improving Project
APPEARANCE
|
|
•Changes: We add a “25x5 Hole Plate”
at the bottom of the original version of the clawbot, which
uses
4 “Threaded Beams” to keep its height.
•Function: In this way, pushing the balls to the other side is more convenient, and actually it also helps the balancing issue. |
Performance
•We changed the motor and the cable of the
claw to help its connecting issue-it lost control before for serval times.
Flexibility
•We tied 3 rubber rings each side to keep the
battery’s position.
•We tied 3 plastic rings to keep the wires' position.
•In this way, the clawbot is reliable, because we don’t have to worry that the motors would lose connections with the main controller while it was turning around up and down. Therefore, the clawbot is able to move much faster.
•We tied 3 plastic rings to keep the wires' position.
•In this way, the clawbot is reliable, because we don’t have to worry that the motors would lose connections with the main controller while it was turning around up and down. Therefore, the clawbot is able to move much faster.
